




Tuning the Engines
Before we take a look at the principles of tuning the engine characteristics (i.e. engine torque behaviour and engine output behaviour in dependence on engine’s speed) we, on the basis of the development of discussions under the introductory sections of our trilogy, consider it important to emphasize once more, the theory application area which we presented. The entirety of conclusions expressed by us in all of the three entries are valid on presumption that we have the option of connecting a multi-speed gearbox to the engine with a possibility to adapt optionally the transference numbers (what we certainly stated in the second paragraph and in the last sentence of the introductory section).
Let’s compare now the two engines according to Fig.9 with different characteristics and let’s calculate the torque Tk[Nm] on the driven wheels at certain (optional, but always the same) car velocity. Both engines in the Competition Special will of course be fitted with gearboxes with different transference numbers (so that the resultant attained maximum velocities to the first and last gears are identical in both cases). These gearboxes shall be designed so that operation modes of both the engines are in the speed range of dif.n [1 rpm] (in other words, when changing a gear with speed nH attained, the speed will drop to nD) while loosing at the same time max. 5% of a maximum actual output.

Fig. 9
[TOČIVÝ MOMENT=TORQUE; VÝKON=OUTPUT; dif.=diff.; /min=rpm]
After selecting, for example, gear iHa =10 for configuration of gearbox and engine according to a), the following condition (nD/nH)=(iD/iH) is valid for constant velocity so that gear iDa=10*8.500/10.000=8.5
To configure gearbox and engine according to b) the condition (nHa/nHb)=(iHa/iHb) – that is iHb=15.000/10.000*10=15 and further iDb=13.000/15.000*15=13 must be met for reasons of comparison possibility (at the identical velocity of Competition Special)
Using the equation (7) from section one of our miniserial we can enumerate the torques on the driven wheels for engine operation modes as determined by speeds nD and nH:
Case a):
TkD=(30/π)*PeD*(iD/nD)=(30/π)*430exp+03*(8.5/8500)=4100Nm, TkH=(30/π)*PeH*(iH/nH)=(30/π)*455exp+03*(10/10000)=4350Nm.
Case b):
TkD=(30/π)*PeD*(iD/nD)=(30/π)*460exp+03*(13/13000)=4400Nm, TkH=(30/π)*PeH*(iH/nH)=(30/π)*490exp+03*(15/15000)=4650Nm.
If we compare the results we can immediately see that the Competition Special fitted with the engine-gearbox configuration according to b) always generates higher values of the torque on wheels Tk[Nm] (and thus also higher values of the resultant driving power F[N] in terms of equation (6) from first section of our miniserial) even in spite of the fact the engine under b) has dramatically lower torque on a crankshaft (set into higher speed and lower by 150 Nm in a peak) than engine a)! It is just this circumstance that penetrates all the sections of our minitrilogy and it proves specifically the irreversible fact that the value of engine torque in no way predicates of its quality. Just on the contrary: if you pay a careful attention to the graphs a) and b) you will find out that the engine under b) has a higher output in the compared driving mode than the engine under a), and it is really only this variable – that is, engine output – that will serve as the only possible comparison criterion for engine quality exactly in conformity with our derivation in the first article (relationships (5), (6), and (7)). We obviously presume that gearbox and engine are tuned perfectly as we demonstrated in the second article.
Do you still consider the engine torque essential? It is not essential, of course.
For the sake of completeness we will now present one more option for a graphical representation of traction which in the light of the last pieces of knowledge already declines in its significance but is still popular for its high clarity. It is so called T-w diagram the X-axis of which depicts velocity w[km/hr] of Competition Special while its Y-axis depicts torque on wheels Tk[Nm] re-calculated simply by mere re-multiplication of engine torque by relevant transference number for this specific engine speed for which velocity is being established (engine speed acts as parameter here), Fig. 10:
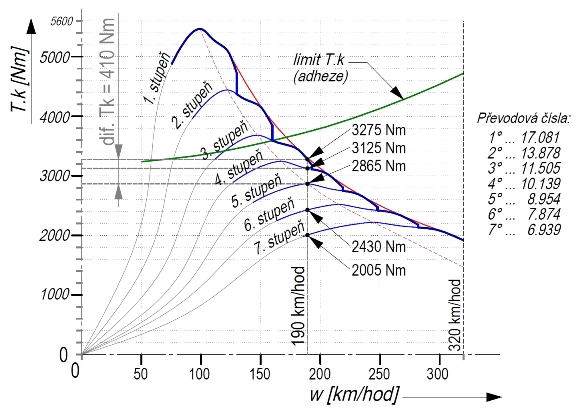
Fig. 10
[TOČIVÝ MOMENT=TORQUE; VÝKON=OUTPUT; limit T.k (adheze)=T.k limit (adhesion); km/hod=km/hr; 1.,2.,3.,4.,5.,6.,7. stupeň=1st,2nd,3rd,4th,5th,6th,7th gear; Převodová čísla=Transference numbers]
It was engine characteristic according to Fig.5 and then the graph according to Fig.8 from the second article of the series that were used as a source material for the creation of graph according to Fig.10 (and since we are not lumber-jacks (may Mr. Tyrrell forgive us) we will use much more technical denomination by keeping the name of speed diagram for Fig.8 from now on as well).
The graphics on Fig.10 shows the torque curves on the vehicle wheels (blue lines) for individual speed gears, then the adhesion limit for a torque transmitted from wheels to roadway (we point out that it is our estimate; we do not keep relevant values at our disposal) which rises quadratically with the car velocity due to aerodynamic thrust force (green line), and also a tangent curve (envelope) of individual moment curves (full red line) which shows maximum possible exploitation of the engine in case when the engine is connected to the variator instead of the seven-speed gearbox. We can tell from the graph, for instance, maximum torque amount on the driven wheels (in the first gear, it makes 5465 Nm which cannot naturally be realized due to insufficient adhesion- wheels would always slip under full exploitation of the engine potential if we are within the graph above the green line of adhesion limit) or, for example, the fact that, with a velocity of 190 km/hr, a vehicle may move to the seventh, sixth, fifth, fourth or third gear while a respective torque Tk 2005, 2430, 2865, 3125 or 3275 Nm is generated on the driven wheels.
Remark 7: We remind again that we will attain a maximum torque on the driven wheels (3275 Nm) in this case (for a velocity of 190 km/hr) in the third speed gear when the engine is being run at a speed nm=18700 rpm and generates a torque on the crankshaft Tm of only 285 Nm (giving almost maximum output here, however) while, on the contrary, in the mode of maximum engine torque Tm=320 Nm (i.e. at a velocity of 190 km/hr with engaged 5th speed gear and at engine speed of 14.500 rpm) the torque on the driven wheels Tk will be mere 2865 Nm. The reason is plain enough.
What is worth mentioning is also the position of envelope of torque curves which touches tangentially the moment curves just in the points where engine generates maximum output- in our case, for the engine with characteristic according to Fig.5 at 18.000 revolutions per minute (red continuous line). This envelope has hyperbolical behaviour showing us the peak of possible engine exploitation- no other circumstances exist under which we can get out of the engine more driving power on the vehicle wheels than just in this case when engine is being operated in the peak output point. On the other hand, the equidistant line (red dash line) shows the situation which took place by connecting a variator to the engine tuned in such a way that the engine is operated in the areas of torque peak on the crankshaft. Please take a note how much torque on wheels we would lose in such a case of engine operation (for a velocity of 190 km/hr it would be a whole 410 Nm… are you still convinced the engine torque is essential?).
With optimum gear shifting, a resultant torque is transmitted to the driven wheels according to the step-type continuation curve which copies moment curves (marked with thick dark blue line on Fig.10). The finer gearing system (the more changed speed gears) the better this step-type curve approaches the ideal “variator” line. Let’s show, for the sake of interest, what would happen with Formula One with five-speed gearbox according to Fig.11:
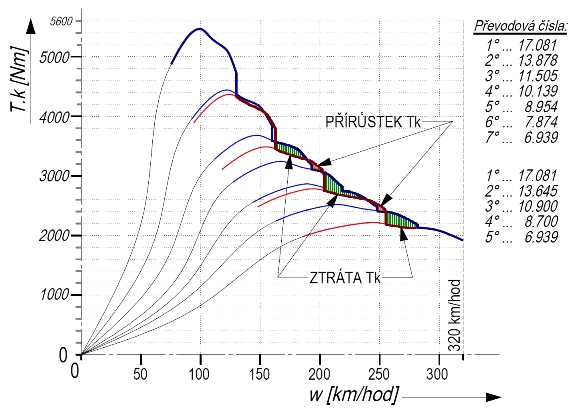
Fig. 11
[PŘÍRŮSTEK Tk=Tk INCREMENT; ZTRÁTA Tk=Tk LOSS; Převodová čísla=Transference numbers; km/hod=km/hr]
The dark blue step-type line illustrates here the behaviour of Tk for tuning with seven-speed gearbox (according to RD from Fig.8 and identically with Fig.10) and the dark red step-type line shows the behaviour of Tk for the five-speed gearbox tuned according to condition dif.n=const while the transference numbers of the first and last speed gear are identical. The green shaded surfaces indicate the loss while the orange surfaces show increment on Tk with using only five speed gears. It is apparent that, in total, a substantial loss took place in the torque on wheels Tk when application of only the five-speed gearbox was attempted. The reason is we had to admit higher speed drop under gear change (in 5° traction) thence we lost much greater amount of output, see Fig.5 (the engine operating torque which conversely increased without any avail should not be better written about at all …).
Let’s take a look at one more quite interesting case of T-w diagram for an engine with constant output in the operation mode (may you hopefully pardon us for our tuning away from F1 application for a little while). We will use as an example an engine from Rally Special Mitsubishi Lancer Evo X with approved gearbox according to FIA Rules for group N4, see Fig.12:

Fig. 12
[TOČIVÝ MOMENT=TORQUE; VÝKON=OUTPUT; dif. n=diff. n; dif. n [1/min]=diff. n [1 rpm]; km/hod=km/hr; 1.,2.,3.,4.,5. stupeň=1st,2nd,3rd,4th,5th gear; Převodová čísla=Transference numbers; Převodová čísla (homologace FIA)=Transference numbers (FIA approval); /min=rpm]
In the upper part of Fig.12 there is a characteristic of the engine with almost flat output within a range of 3300-5500 rpm (note the hyperbolical behaviour of engine torque curve- do you remember Fig.4b from the second section?) and T-w diagram established for approved transmissions of the 1st-5th speed gear. The interrupted blue lines on this graph (right upper area) show the recalculated torque Tk on wheels for engine’s operation mode above 5500 rpm. Take a note that there is absolutely no sense in operating the engine in this mode (since far more convenient way is change a gear to shift by doing so the engine mode into dif.n area with higher output). However, if you can recall our derivation of the ideal performance curve in the second article and the text below Fig.4 at the same place, then you may perceive that something is out of tune. Sure- we deduced (see also equation (6) from the first article) that if we operate engine in the area of constant output, then gear shifting does not make sense at all (within a range of dif.n). But the speed drop under gear change in Lancer Evo X approved by RalliArt company is far from a constant speed drop. Thus, let’s try to recalculate the gearbox for dif.n=const and draw T-w diagram for this case of traction, on Fig.12 above. Take a note that even though we adjusted transference numbers to reduce the number of gears to be changed to four only, we lost nothing of the torque on wheels and the original (blue) curve shape coincides completely with the (red) curve for four-speed traction case! Even with velocity of 200 km/hr and higher we detect increase in the torque on wheels.
We can see here how strange the traction principles may often be even for engineers in renowned companies and what fatal errors they can commit. We can grasp it, say, in N4 technique; however, if we see gearings designed in similar silly way in WRC cars as well, it is, to put it very mildly, sad. In fact, the only thing that would have sufficed is knowledge, understanding, and application of equation (6) from the first article.
However, we remark that this modification to gears (from five to four changed speed gears) we could afford purely because the engine, when in the applied operation mode, gives almost constant output (it would have not been possible in another case). Take also a note of the shape of operating torques line Tk in the graphs on Fig.12- it has typical hyperbolic behaviour, evoking at the first sight a variator line (as well as hyperbolic line) typical of a maximum possible exploitation of engine potential by operating it in the constant output point. Suddenly, we have a special case here when, by tuning the engine to a constant output curve we are capable of reaching the peak driving power on the car wheels without having to use a variator. Do you remember the article above Remark 5 in the second article dealing with the myth of engine’s flat torque?
Let’s get back to the Formula One technique now to demonstrate various possibilities for tuning the F1 engines whereas we will assess individual configurations according to performance curve behaviours and in conformity with the conclusions made in the previous entries. As initial characteristic we will use the graph from Fig.5 of the Second Section which we will redraw into Fig.13 using a red dotted line a to compare the new possible characteristic-solving variants with this initial condition.

Fig. 13
[dif.P=diff.P; dif. n=diff. n; DETAIL PROVOZNÍHO REŽIMU=OPERATION MODE DETAIL; /min=rpm]
Since, in such sophisticated technique as Formula One undoubtedly is, we suppose capability of operating the engine in optimum speed mode limited by the speed drop after gear change dif.n [1/min] as is depicted by the grey texture in the picture’s right part, we will be concerned namely with this area. Now let’s try to put ourselves in a role of engine developers and make it our goal to modify the initial performance curve a so as to increase the vehicle’s drive output with the existing gearbox (with a constant speed drop). The first hypothetical possibility is to re-tune the engine according to performance curve b (green) which is the most optimal transformation of initial performance characteristic with preserved output (since, as we deduced in our second article using Fig.4b and in the previous text, the engine operated in the constant output mode generates the maximum torque on wheels at a specific velocity for any combination of transference numbers). But this shape of performance curve is hardly attainable for atmospheric engine (on the other hand, this characteristic can be attained easily in turbocharged Diesel engines, see, for example, rally cars of WRC or N4 specification). By contrast, attainment of performance curve according to c (blue) is already real, and we would be sure to get to finish faster and earlier with engine tuned this way. There is a possibility then to tune the engine according to characteristic d (orange) that gives far highest torque on engine’s crankshaft though owing to which the engine will be comfortably “flexible”, however, the absence of the output peak (we speak of the useful output peak here) would for sure cause aggravation of vehicle’s drive output.
And now it’s time to draw a thick line; we have sufficed with elementary physics so far (and we recorded many an accomplishment in spite of simplicity of our attitude without considering the influence of dynamics); however, we have already no unambiguous answer to the assessment of performance curves e and f. In curve e we can surely guarantee an improvement of vehicle’s drive output (in conformity with definition under Remark 1 from the first article) only if we narrow down the engine’s operation mode. However, it would lead to both more frequent gear shifting and increased demands on a pilot. But dynamical analysis for a particular circuit would already be required to assess the configuration of engine tuned to curve f, and the “hole” in the behaviour of engine’s output and torque right under the operation mode would have a fatal impact on the drive output providing the pilot errs or under extreme weather.
We will close our minitrilogy on the relationship of output and torque by simple listing of engine tuning mechanisms for various types of performance characteristics which is executed namely by timing the gears, shape and length of channels, exhaust pipes, shape of combustion spaces, and further interventions in the engine structures, whereas an increase of parameters in one area usually leads to a loss in the other area of engine characteristic but it is another story…